
Research

News
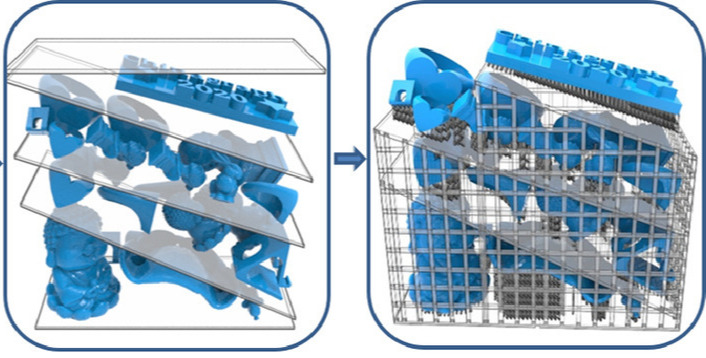
3D打印的多级堆叠
3D打印的多级堆叠:一种基于层次的脚手架结构,将堆叠模型逐级排列的3D打印方案。通过在脚手架上生成支撑结构,对每一层迭代选择候选模型及其姿态,以达到局部最优的安排。堆叠模型之间不需要相互支撑。GMTY检测语言世界语中文简体中文繁体丹麦语乌克兰语乌兹别克语乌尔都语亚美尼亚语伊博语俄语保加利亚语信德语修纳语僧伽罗语克罗地亚语冰岛语加利西亚语加泰罗尼亚语匈牙利语南非祖鲁语卡纳达语卢森堡语印地语印尼巽他语印尼...
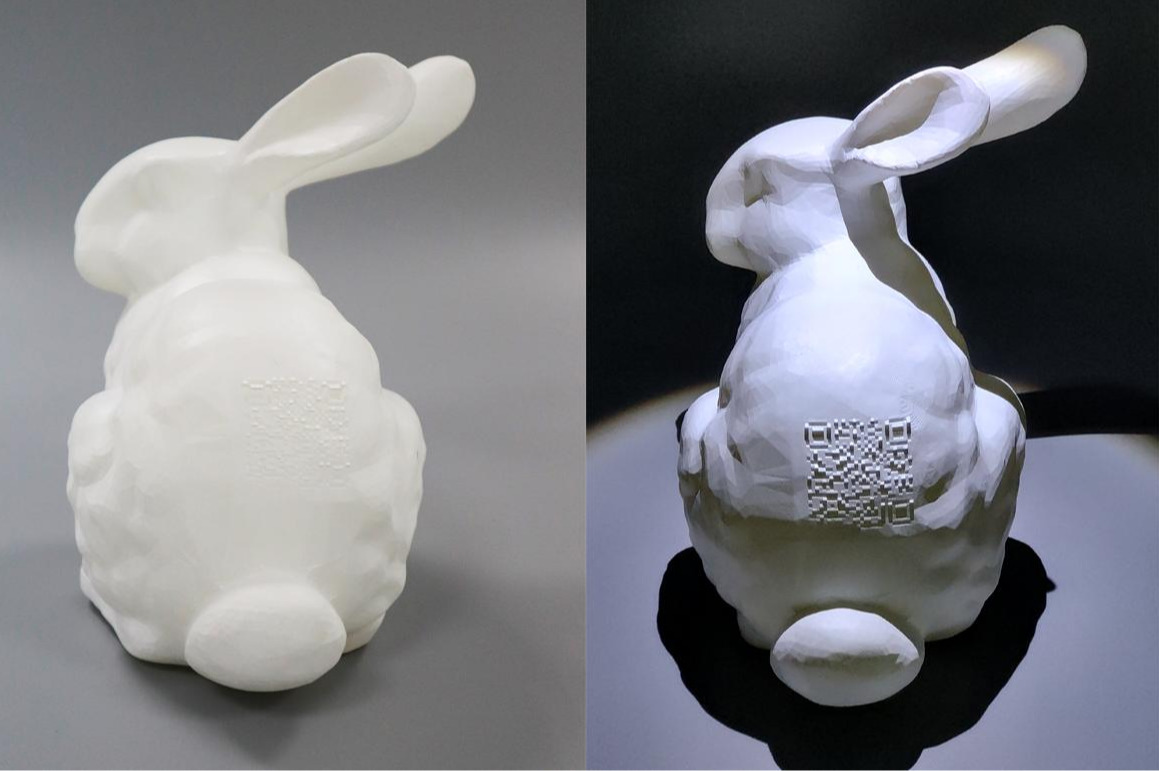
3D打印QR码
3D打印QR码:在打印的3D形状的表面上雕刻二维码,通过在形状上雕刻模块来模拟光照现象,以确保打印的三维二维码具有足够的对比度。GMTY检测语言世界语中文简体中文繁体丹麦语乌克兰语乌兹别克语乌尔都语亚美尼亚语伊博语俄语保加利亚语信德语修纳语僧伽罗语克罗地亚语冰岛语加利西亚语加泰罗尼亚语匈牙利语南非祖鲁语卡纳达语卢森堡语印地语印尼巽他语印尼爪哇语印尼语古吉拉特语吉尔吉斯语哈萨克语土耳其语塔吉克语塞尔维亚语...

3D人体数据采集
3D人体数据采集:基于化身科技自主搭建的三维信息捕获设备,实时采集人体三维姿态,构建高逼真感的三维人体模型。

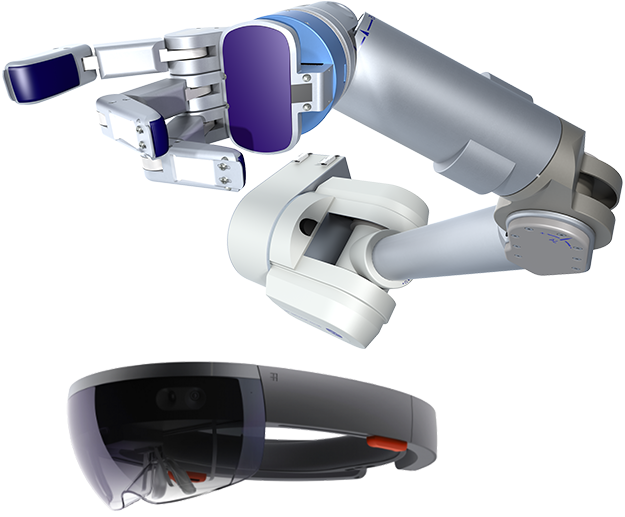
机械臂路径规划
机械臂路径规划: 利用正逆运动学原理以及采样规划算法,在ROS系统下进行调试,实现机械臂两个位姿之间平滑且可避障的运动轨迹规划。
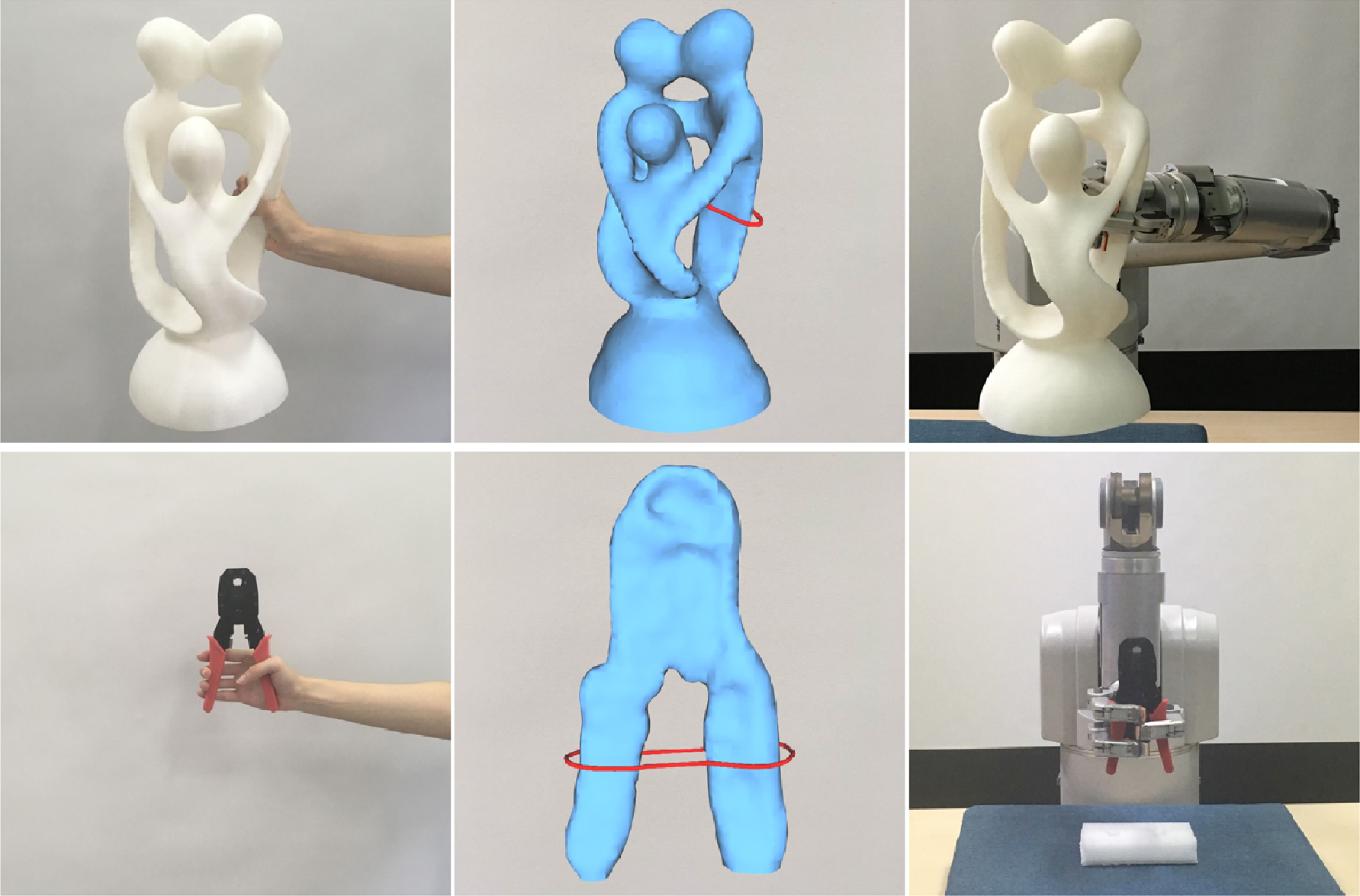
机器人抓取
机器人抓取:基于形状感知的距离场构建物体的形状嵌入空间作为抓取物体的抓取空间,通过离散的Morse鞍点原理构建空间中的p-based 测地闭环,以此引导机器人通过环抓取方式抓取物体

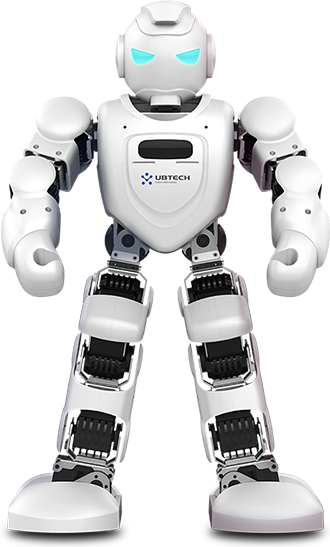
移动物流机器人
移动物流机器人:利用三维计算机视觉技术获取场景信息,针对移动物流场景研发目标分割、物体识别、机械臂抓取、机械臂路径规划等任务。
Public Service
Faculty