News
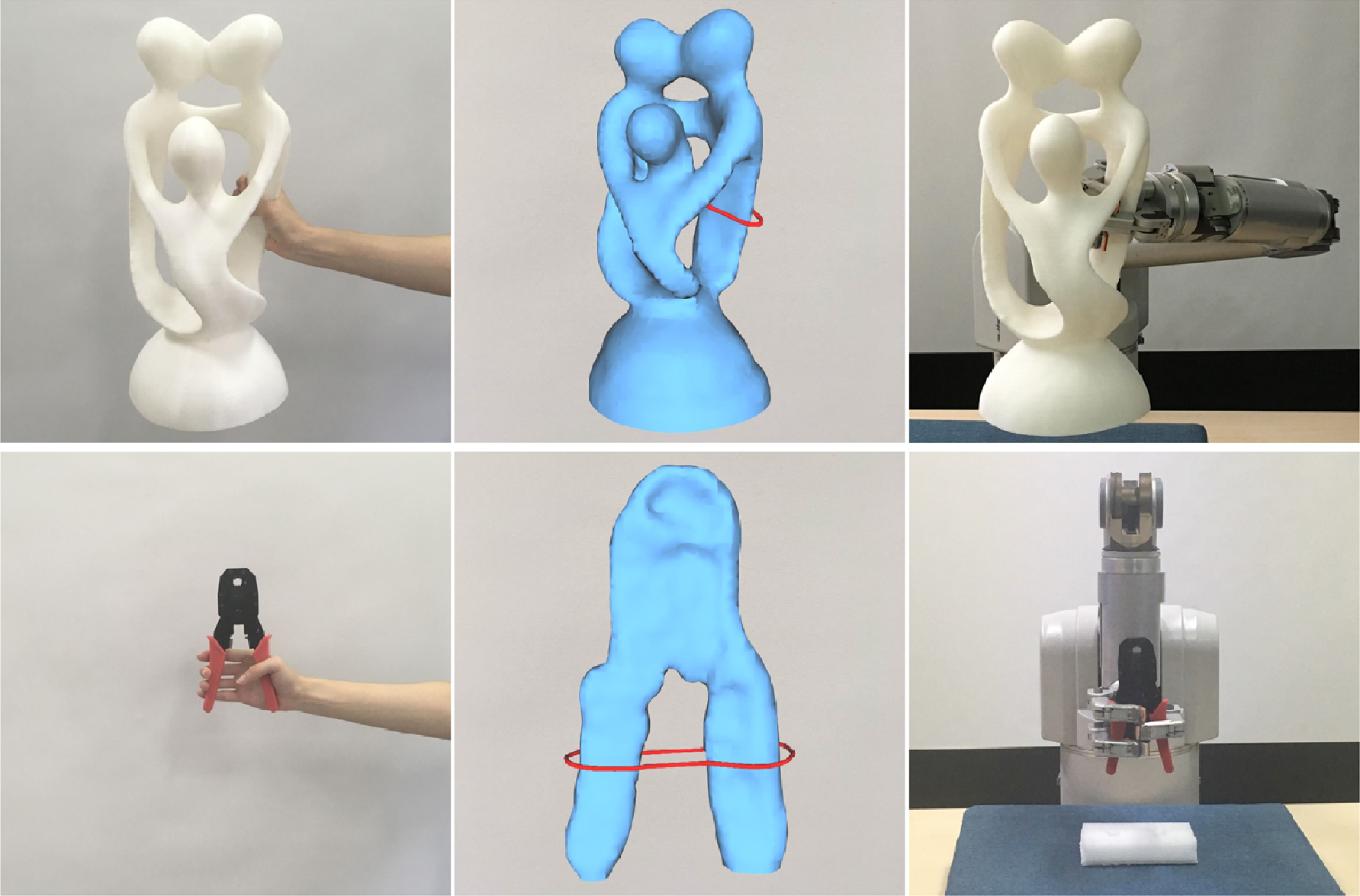
·机器人抓取:基于形状感知的距离场构建物体的形状嵌入空间作为抓取物体的抓取空间,通过离散的Morse鞍点原理构建空间中的p-based 测地闭环,以此引导机器人通过环抓取方式抓取物体。
【关闭】