News
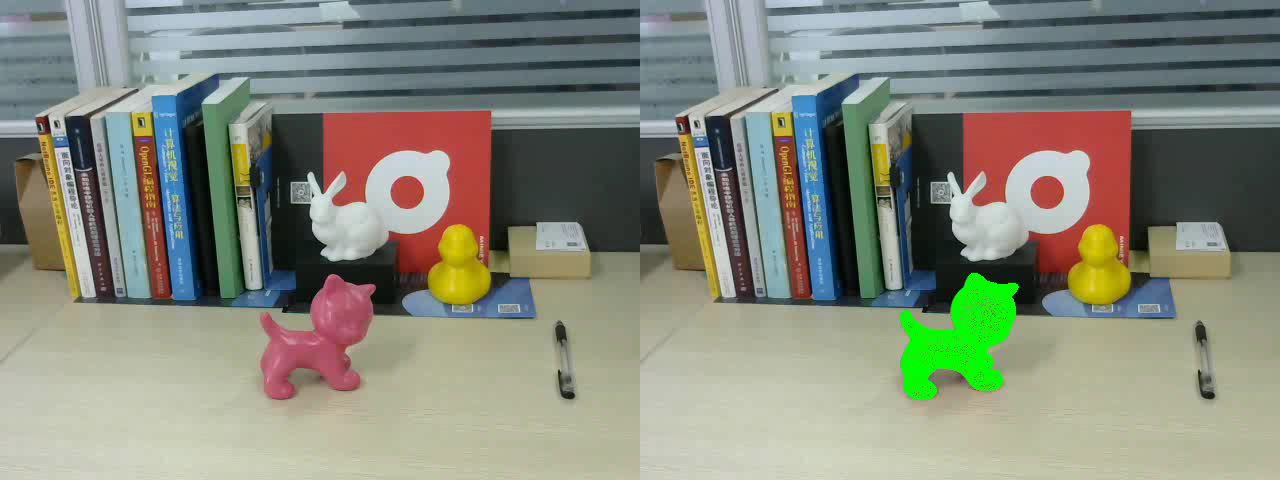
本项目主要负责基于三维模板的物体实时跟踪注册,估计图像中物体的三维位置和姿态:
·支持无纹理物体、任意的相机和物体运动
·结合在线检测,支持从跟踪失败的情况自动恢复
·对快速运动、复杂背景、遮挡等复杂情况具有较好的稳定性
·在普通电脑上帧率可达60fps
【关闭】