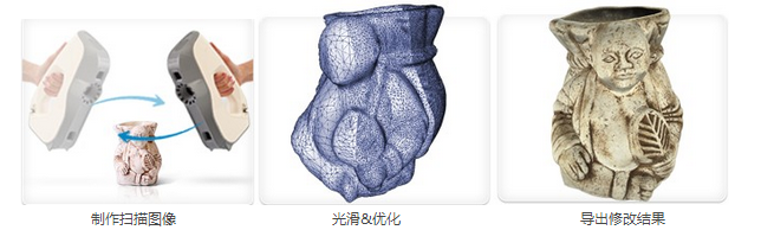
1. 利用扫描仪扫描模型并进行后处理;
-Kinect介绍:
Kinect是美国微软公司于2010年11月4日推出的XBOX-360游戏机体感周边外设的正式名称,它实际上是一种3D体感摄影机,利用即时动态捕捉、影像辨识、麦克风输入、语音辨识、社群互动等功能让玩家 摆脱传统游戏手柄的束缚,通过自己的肢体控制游戏,并且实现与互联网玩家互动,分享图片、影音信息。
Kinect设备如图1所示。基座和感应器之间有一个电动机,在上面的感应器中有1个红外投影仪,2个摄像头,4个麦克风和1个风扇.图1最左边a是红外光源;b是LED指示灯;c是彩色摄像头,用来收集RGB数据;d是红外摄像头,用来采集景深数据.彩色摄像头最大支持1280*960分辨率成像,红外摄像头最大支持640*480成像。
Kinect扫描仪介绍
Kinect扫描仪操作指南及视频资料如下:
Kinect-KScan3D-tutorial.zip (316 M)
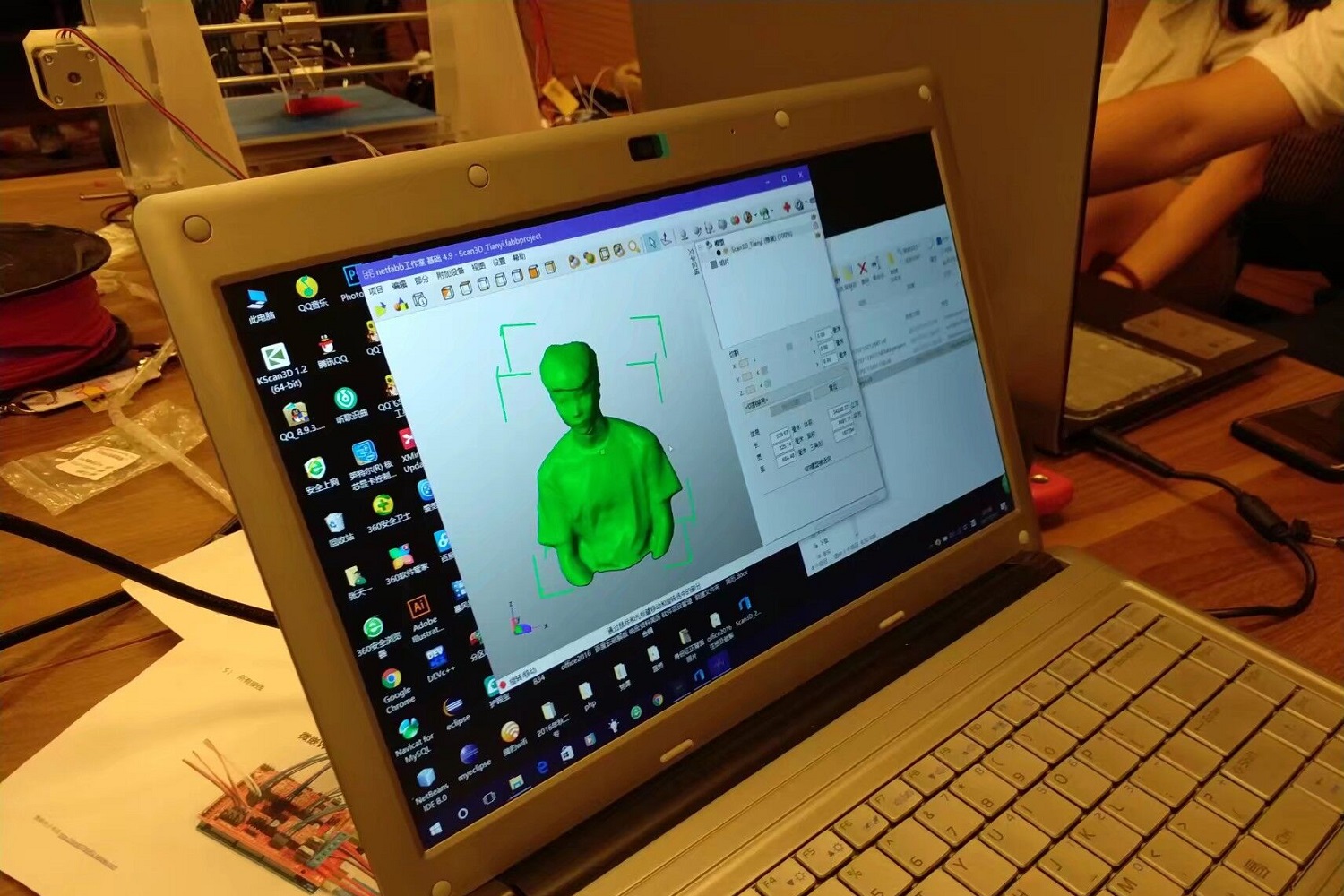
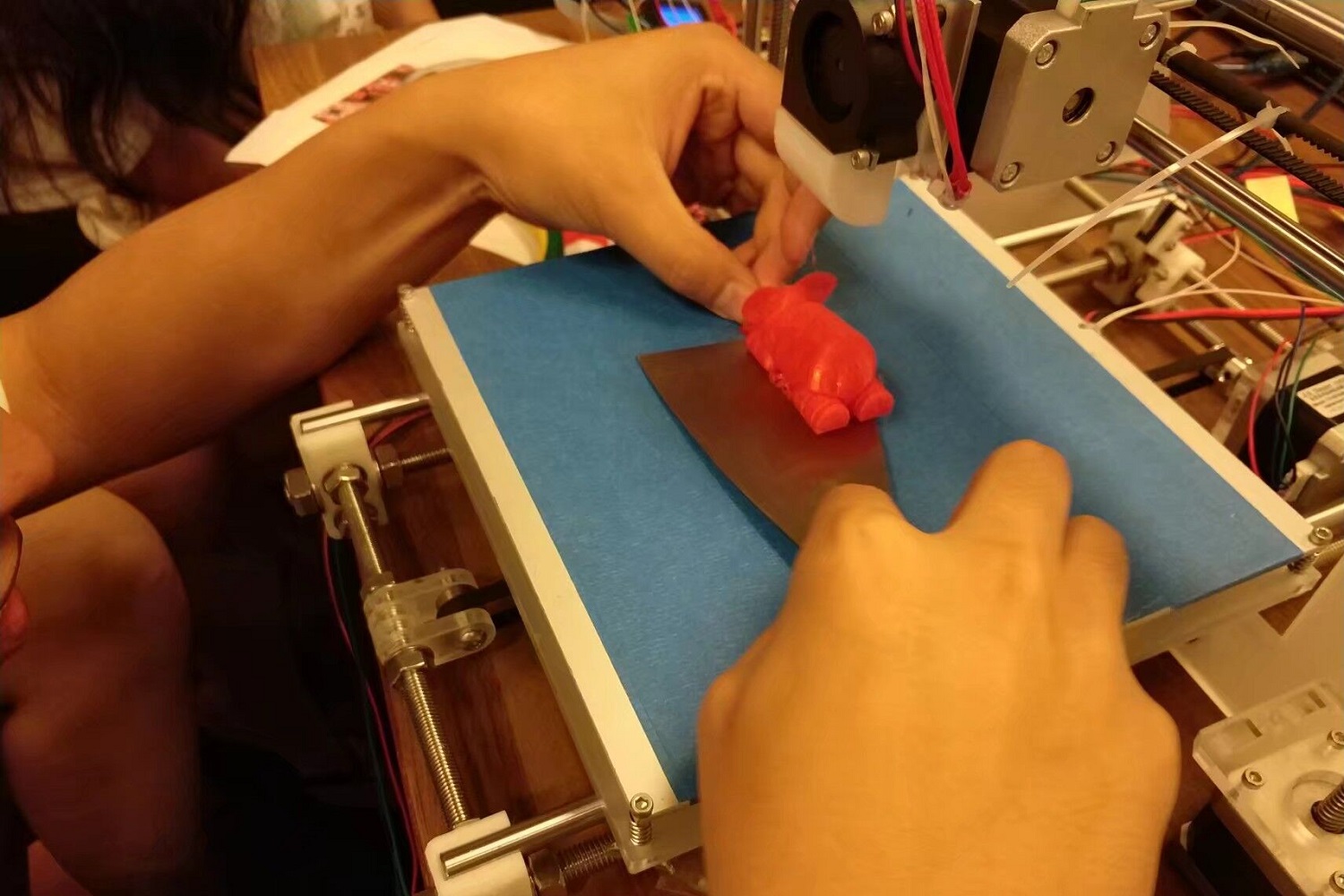
学员使用Kinect进行扫描
-Artec介绍:
Artec Eva 3D扫描仪是Artec扫描仪系列中的新贵。这种扫描仪是为需要快速、准确以及纹理扫描的客户量身定做的。Artec Eva不需要对物体进行标记或校准。它可以迅速地用高分辨率捕获物体外形,并可以真实还原物体鲜艳的色彩。其捕获精度可达16帧每秒。这些帧图像可以自动校准对齐,使扫描过程变得简单快捷。这点对于影视制作、医学应用以及生物力学的研究尤为重要。由于Eva扫描图像的画质极高,所以被应用到CG/动画制作、现场取证、医药等行业。
Artec Eva扫描仪介绍
Artec Eva扫描仪操作指南及视频资料如下:
Artec3D-tutorial.zip (146M)
2. 组装XYZ型打印机;
-XYZ型Prusa i3结构 打印机:
目前市场上很常见的一种结构,专业名称为并联臂结构。这种结构最早是用于能够快速准确抓取轻小型物体的机器雕爪而设计的。现在为使用这种结构的机器人称之为并联机器人。这种结构兴起于90年代,因其速度快、精度高、柔性强等优点使并联机器人成为了现代工业机器人重要部分。
并联臂结构应用于3D打印机上就变成了我们常说的三角洲或Delta机型。以三角洲机型的运动结构可以分成两种,一种是目前市场上最多采用的Rostock和kossel打印机为代表的运动机构,另一种是并联机械手臂结构。两种结构前者跟偏向实际应用,后者的研究偏向理论数据分析。我们今天主要谈论的就是Rostock/kossel机型。
三角洲机型相比较其他结构的机型占地面积更小,结构也相对简单。在模型的尺寸大小上三角洲可以打印出更高尺寸的模型来。由于其结构的关系打印速度更快传动效率更高。三角洲的劣势与优势同样也是因为他的并联臂结构。虽然三角洲的占地面积较小,但是由于打印机需要给3个并联臂留出移动空间,这就直接限制了打印机在空间上的利用。除此之外由于其坐标定位采用的是一种特殊的插值算法,对于一些弧形结构只能采用多个直线段逼近的方式,导致其打印精度稍有不足。
优点:
1.结构简单,易于上手,适合第一次接触3D打印的diy爱好者。
2. 开放式设计方便升级硬件或修理维护。
3. 双z轴电机设计使打印头移动更加稳定。
-组装和调试:
这里我们使用的是微嵌 WQ0003 FDM 类型3D打印机(Prusa I3 改进型),组装及调试手册如下:
WQ0003组装手册 V5.0 (10.1M)
WQ0003调试&使用手册V2.0.pdf (1.4M)
组装完毕后,由助教引导同学按照手册进行固件烧录,打印机调平等工作。
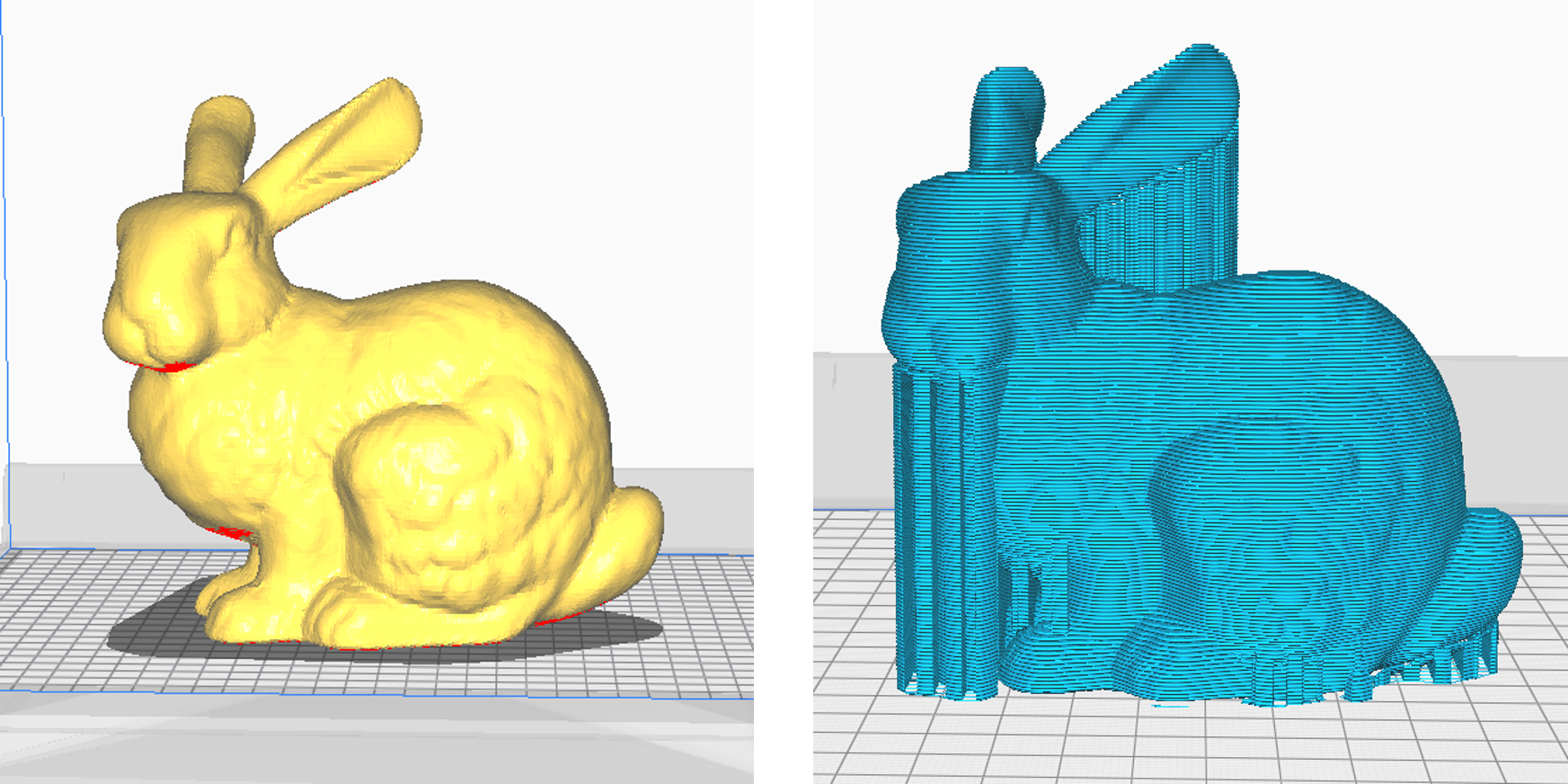
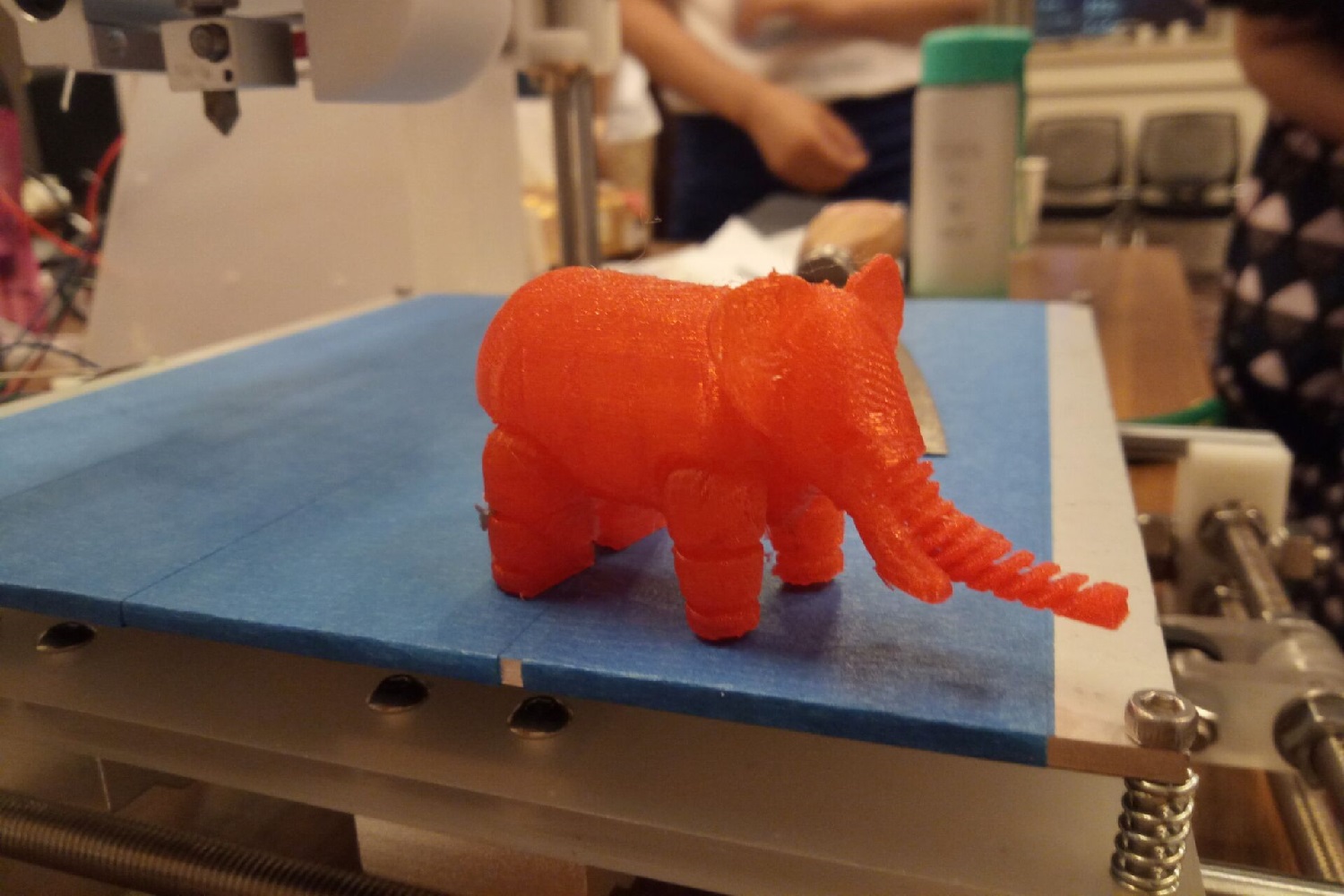
3. 将扫描得到的模型切片打印:
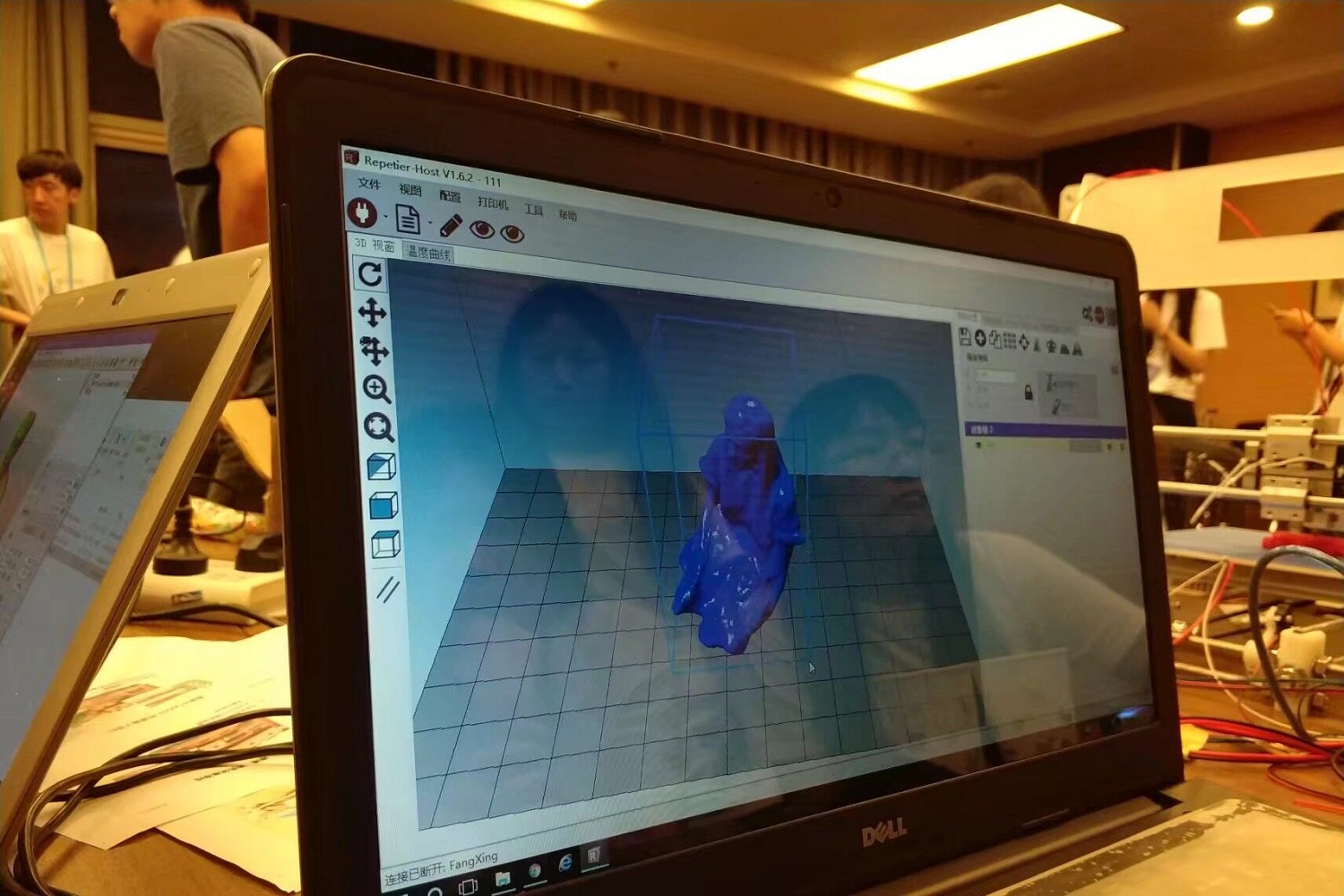
利用Cura软件将扫描得到的模型切片,然后用组装的打印机打印出来。
对bunny模型切片得到G-code文件