本届“可视计算”暑期学校包括18个邀请报告、4个DIY实践项目及1个智能制造论坛。 我们邀请了香港大学、香港科技大学、清华大学、北京大学、浙江大学、中国科学技术大学、西安交通大学、南京大学、华中科技大学、上海科技大学、山东大学等一流高校的专家学者和参会者一起交流科研成果、探讨学术前沿。报告主题涵盖 面向智能制造的三维建模、具身智能、三维视觉和科学数据可视化等。
暑期特色活动:
DIY实践: 学长学姐们全程线下指导,提供了智能机器人、几何建模与制造、视觉与AR、科学数据可视化四个方向,让大家亲自动手实践,对表现优异者颁发奖励。
名师面对面:与领域顶级专家及国内同行畅谈创新思维,分享奇思妙想,碰撞思想火花。
魅力七月,我们期待您的加入!
山大同学:请在选课系统再次开通时进行选课,课程号SQ0000021N。
山大未选课本科生、研究生、教师、企业人员等:2025年7月3日前,扫描下方二维码(或者点击报名网站报名网站 进入报名系统)填写报名信息。
7月4日-7月5日为审核选拔阶段,期间向通过选拔的学员发送确认邮件。接收到邮件后,报名人员需在7月7日前缴费并回复确认邮件,逾期视为自动放弃,7号后将不予退费。
收款单位: 山东大学
银行账号: 37150199766500000030
开户银行名称: 中国建设银行即墨蓝谷支行(若需上一级支行,请填写:建设银行即墨支行)
转账时备注:姓名+可视计算暑期学校
报名地址:山东大学交叉研究中心暑期学校报名系统

Taku Komura 香港大学
报告题目:Physics-based Character Control
报告摘要:In this lecture, I will describe physics-based character control, which has a wide range of applications from computer games to humanoid robot control. Character control in a physical environment presents challenges due to complex body dynamics and the discontinuity of ground reaction forces. Recent advances in deep reinforcement learning have significantly improved character controllability and expanded the range of possible movements. I will first outline classic and fundamental approaches to character locomotion control. Then, I will discuss recent methods for generating character movements learned from human motion capture data.
个人简介:Taku Komura,香港大学计算机科学系教授。他在东京大学先后获得信息科学学士、硕士和博士学位。他的研究主要集中在数据驱动的角色动画,基于物理的动画,人群模拟,3D建模,布料动画,基于解剖的建模和机器人技术。最近,他的主要研究兴趣是基于物理的动画和机器学习技术在动画合成中的应用。他曾获得2014年英国皇家学会产业奖学金和2017年谷歌AR/VR研究奖。2022年,他的角色运动合成工作DeepPhase创新性提出适合运动数据的周期性自动编码器,荣获SIGGRAPH最佳论文奖。2024年,Komura教授入选 AI 2000 位最具影响力的学者名单,在计算机图形学领域排名第 15 位。目前,Komura教授正在担任2025年SIGGRAPH Asia大会主席,不断致力于推动计算机图形学和交互技术的创新与发展。

王鹤 北京大学
报告题目:合成数据驱动的具身VLA预训练新范式
报告摘要:具身视觉-语言-动作(VLA)大模型被认为是走向通用机器人的重要技术路线,然而具身动作数据的昂贵和不足是目前的重要瓶颈。相较于采集真实动作数据,大规模、高质量的合成动作数据为VLA的零样本泛化提供了一个更可行且低成本的方案。本报告以端到端操作模型GraspVLA 和端到端导航Uni-NaVid、TrackVLA 等系列工作为例,探讨完全以合成动作数据进行预训练的VLA新范式及其惊人的零样本泛化能力以及与真实数据的结合。
个人简介:王鹤,北京大学计算机学院前沿计算研究中心助理教授、博士生导师,北京银河通用机器人公司的创始人和CTO,智源学者。2021年博士毕业于斯坦福大学,师从美国三院院士Leonidas. J Guibas教授;2014年本科毕业于清华大学。主要研究具身多模态大模型、人形机器人、通用机器人。曾荣获蚂蚁InTech科技奖,《麻省理工科技评论》“35岁以下科技创新35人”(TR 35中国区),2024年北京大学-中国光谷科技成果转化奖,英特尔中国学术英才计划荣誉学者等称号。曾获ICCV2023最佳论文候选,ICRA2023最佳操纵论文候选,2022年世界人工智能大会青年优秀论文(WAICYOP)奖,Eurographics 2019最佳论文提名奖。担任CVPR和ICCV的领域主席。

弋力 清华大学
报告题目:从人类运动中学习多样化的人形机器人交互技能
报告摘要:赋予人形机器人在多种场景下的交互能力是具身人工智能研究的重要目标。然而,人形机器人因其复杂的动力学特性、高维感知与控制需求以及欠驱动特性,技能学习过程面临诸多挑战。得益于人形机器人与人类形态的相似性,人类丰富的交互运动数据为其提供了宝贵的先验知识。如何高效利用这些数据,学习并指导多样化的人形机器人交互技能,是本次报告的核心主题。报告将分享团队在这一领域的探索,介绍多种学习路径,并展示人类运动数据在人形机器人技能开发中的巨大潜力。
个人简介:弋力博士现任清华大学交叉信息研究院助理教授,国家优青(海外)。他在斯坦福大学取得博士学位,导师为美国三院院士Leonidas J. Guibas教授,毕业后在谷歌研究院任研究科学家。他近期的研究聚焦于三维视觉与具身智能,他的研究目标是赋予机器人理解并与三维世界交互的能力。他在计算机顶级会议期刊上已发表论文七十余篇,引用数三万余次,代表作品包括ShapeNet Part,SyncSpecCNN,PointNet++等,大大影响了三维深度学习这一领域的出现与发展。此外他还曾担任CVPR、IJCAI、NeurIPS等顶会的领域主席与SIGGRAPH TPC等。

章国锋 浙江大学
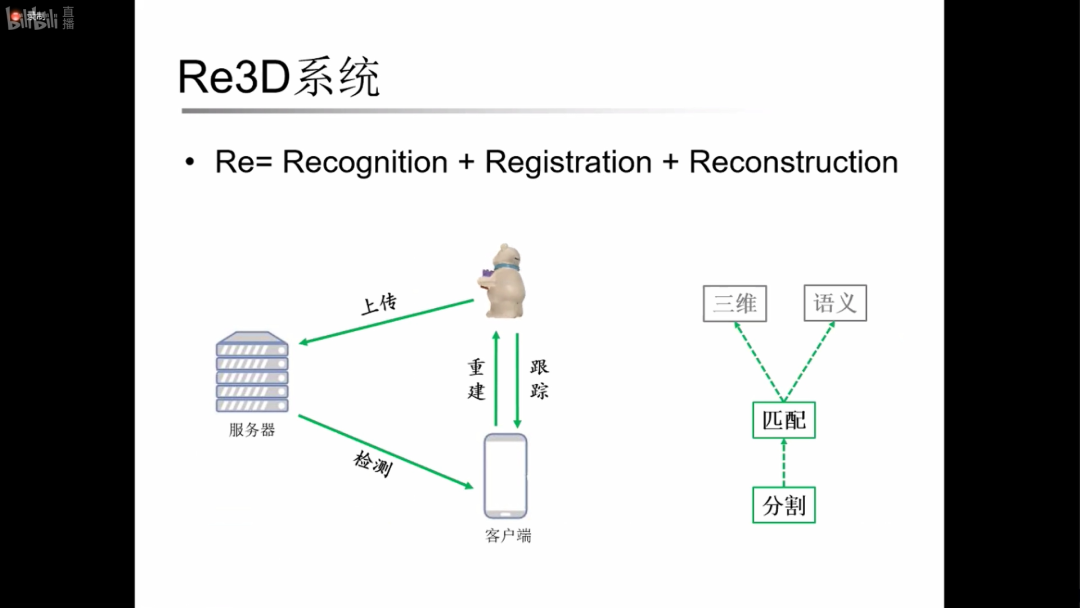
报告题目:端云协同的视觉定位与重建生成
报告摘要:基于视觉的跟踪定位和三维重建与生成,在AR/VR、机器人、自动驾驶等领域有着广泛的应用前景。由于真实环境的复杂性,跟踪定位、三维重建和生成技术在实际应用中往往会面临一些关键性的挑战。例如,如何让移动设备在大尺度复杂场景下做到实时稳定的跟踪注册?如何克服传统三维重建技术的局限性,实现对复杂场景高效完整的重建与生成?本次报告主要汇报我们课题组近几年为了解决这些关键问题所做的研究工作以及研制的基于端云协同的混合现实平台以及场景重建与生成平台,并展示相关的应用。
个人简介:章国锋,浙江大学求是特聘教授,博士生导师,国家杰出青年科学基金获得者。主要从事三维视觉、增强现实与空间智能方面的研究,尤其在SLAM、三维重建和生成方面取得了一系列重要成果,开源了一系列相关系统和算法的源代码,是OpenXRLab扩展现实开源平台的主要发起人。曾获2010年CCF优秀博士学位论文奖、2011年全国优秀博士学位论文奖、2020年浙江省技术发明奖一等奖(排名第4)、2021年浙江省自然科学奖一等奖(排名第2)以及国际顶级会议ISMAR 2020唯一最佳论文奖。担任国际顶级期刊IJCV编委,以及《Virtual Reality & Intelligent Hardware》、《计算机辅助设计与图形学学报》和《中国图象图形学报》等期刊编委,中国图象图形学学会虚拟现实专委会副主任、增强现实核心技术产业联盟副理事长、浙江省人工智能学会增强现实分会副会长。

张举勇 中国科学技术大学
报告题目:可解耦三维表达、建模与生成
报告摘要:近年来,以NeRF、3DGS为代表的辐射场表达具有保真度高、端到端可微等优点,在物体、场景与人的重建与生成方面取得了巨大突破。然而,NeRF等隐式辐射场依赖光线追踪的密集采样导致计算资源消耗巨大,难以实现实时渲染;3DGS等显式辐射场其无序点云特性导致几何拓扑缺失,无法支持物理属性嵌入与真实物理仿真。在本次报告中,我将首先介绍StructuredField表达,该结构化可微辐射场表达可同时支持高精度几何、高保真渲染以及基于四面体表达的物理仿真,然后介绍由单目视频输入实现可解耦人体与衣服重建的D^3-Human,在最后介绍可同时满足多个语义Prompt的三维模型生成方面的研究工作。
个人简介:张举勇,中国科学技术大学数学科学学院教授,中国科学技术大学先进技术研究院副院长,获国家基金委优秀青年基金、中科院青促会优秀会员资助。担任IEEE Transactions on Multimedia、IEEE Transactions on Mobile Computing编委。研究领域为计算机图形学、三维视觉,以实现对真实物理世界进行高效高保真三维数字化与高真实感虚拟数字内容的创建。

曾薇 西安交通大学
报告题目:计算共形几何及应用
报告摘要:近年来,计算共形几何作为一个由数学、计算机等多门学科组成的交叉领域,已经逐步被各领域学者认识及了解。本次报告主要包括三部分:(1)简要介绍/总结计算共形几何的理论框架及引申工作;(2)举例阐述其在各领域中的典型应用;(3)探讨其与人工智能模型及应用的链接方式。
个人简介:曾薇,西安交通大学数学与统计学院教授、博导,国家级青年人才计划入选者。中国科学院计算机科学与技术专业博士学位,微软亚洲研究院、美国纽约州立大学石溪分校联合培养;美国纽约州立大学石溪分校博士后。研究方向聚焦于计算共形几何理论与算法及其在医疗、工程、人工智能交叉领域的应用;同时探索微分几何、最优传输与可解释性深度学习的关联理论与方法。出版Springer专著《Ricci Flow for Shape Analysis and Surface Registration: Theories, Algorithms and Applications》。获CAD/CAM最佳论文奖和世界华人数学家联盟最佳论文奖。

龙霄潇 南京大学
报告题目:面向具身感知与操作的空间智能技术
报告摘要:空间智能技术是推动机器人与智能系统实现高效环境感知、理解与交互的关键。随着应用场景的不断拓展,对三维环境的高精度重建和复杂场景理解提出了更高要求。针对传统三维重建方法在几何表达和实际应用中的局限,本报告介绍了一种基于三维高斯重建(3D Gaussian Splatting, 3DGS)的空间智能技术。通过引入几何增强算法,3DGS在几何精度上得到显著提升,更好地满足了机器人抓取与操作等任务的需求。此外,报告还涵盖了一系列三维视觉基础模型的开发与应用,包括深度估计、法向估计和生成式三维建模技术等,为空间智能系统提供相关技术基础。
个人简介:龙霄潇,南京大学智能科学与技术学院副教授,博士生导师,南京大学紫金学者,入选2024年国自然基金委海外优青计划。2018年本科毕业于浙江大学,2023年博士毕业于香港大学。 长期从事三维重建与生成、神经渲染、三维基础模型等空间智能技术研究,近五年来在T-PAMI、CVPR、SIGGRAPH等期刊会议上发表第一作者与通讯作者论文20余篇,谷歌学术引用3000余次。带领学生获得2025年ICRA ManiSkill-ViTac视触融合操控挑战赛冠军。

李好 华中科技大学
报告题目:基于共形几何的多尺度曲面结构设计方法
报告摘要:随着航空、航天、航海等领域高端装备的不断迭代发展,以运载火箭助推器尾段、航空发动机叶片、风机叶片等为代表的复杂曲面构件得到了广泛的应用,且常存在超轻质、高承载、抗冲击的结构性能与功能需求。本报告面向复杂曲面构件的综合性能需求,探讨了典型曲面构型的共形参数化建模、多尺度优化设计、超材料填充的优化设计等理论和方法,实现了典型多尺度复杂曲面结构件及其填充材料微结构的建模-分析-优化过程。
个人简介:李好,华中科技大学教授,博士生导师,担任国家重点研发计划青年科学家项目负责人,入选国家级青年人才计划、湖北省高层次人才计划。主要围绕航空、航天、航海等重点领域关键产品的轻量化、整体化、多功能设计需求,从事几何驱动的拓扑优化设计方法及软件、功能超材料结构的多尺度设计与制造、面向制造的优化设计方法与技术等方面的科研工作,发表专著2部、SCI论文40余篇(ESI高被引论文2篇,SCI引用1000余次),申请/授权发明专利20项、登记计算机软件著作权5项。主持国家重点研发计划项目、国家自然科学基金青年、面上项目、基础加强计划技术领域基金、中国博士后科学基金、上海航天科技创新基金、中航工业601所委托项目等10余项。相关成果在航天科技、航天科工、中航工业、中国船舶、兵器工业的骨干企业取得成功应用,获湖北省科技进步奖(2项)、华为“火花奖”等奖励。

韩俊 香港科技大学
报告题目:Large-Scale Scientifc Data Compression and Visualization via Neural Fields
报告摘要:Scientific data in 3D-grid formats from various domains, such as oceanography and cosmology, plays a critical role in enabling scientists to discover new phenomena, analyze data patterns, and validate assumptions. With the growing capabilities of supercomputers, the size of scientific data has increased significantly from terabytes to exabytes. This poses challenges in compressing and visualizing those data.
个人简介:韩俊,香港科技大学新兴跨学科学部的助理教授。他在圣母大学(University of Notre Dame)获得计算机科学与工程博士学位。他的研究重点是科学可视化、人机交互和机器学习,旨在高效地生成、探索和理解科学数据。他的作品获得IEEE CG&A最佳论文奖2022和ACM UbiComp杰出奖2018。他从2023年到2025年担任IEEE VIS计划委员会成员。

许岚 上海科技大学
报告题目:光场智能:从重建到生成
报告摘要:多模态生成式人工智能的发展,为高质量的动静态场景重建、渲染和生成都带来新突破,并且有望服务于未来的元宇宙或者人机交互应用。本次报告结合过去一年课题组在这些方面的科研进展,重点分享关于神经渲染和三维生成技术在组合、理解和交互方面的一些新思路,并且分析未来发展的问题和方向。
个人简介:许岚,上海科技大学信息科学与技术学院助理教授、研究员、博士生导师,MARS实验室主任。他的研究方向聚焦于计算机视觉、计算机图形学和计算摄像学,致力于光场智能重建理论与技术,重点关注动静态场景重建与生成、体积视频、神经渲染、人物交互动作分析等等方向。近年来,他率团队研制了系列光场装置,相关研究成果被 ACM TOG、IEEE IJCV、IEEE TPAMI、SIGGRAPH、SIGGRAPH Asia 和 CVPR 等顶级期刊与会议收录,并在 SIGGRAPH 2024 获两项最佳论文奖荣誉提名、在SIGGRAPH2025获最佳论文奖。
刘继凯 山东大学
报告题目:面向增减材制造的结构拓扑优化研究
报告摘要:增减材制造技术在过去十年得到了长足的发展,所加工的材料力学属性已接近或达到传统锻件水平,凭借逐层材料堆积+间歇铣削加工的组合工艺,增减材制造在达到现有铣削工艺构件同等成形质量的基础上,可通过增加结构复杂度,大幅度降低相关构件重量,这一优势在航空、航天、汽车、生物医药等尖端技术领域受到了广泛的青睐。本次报告将详细讲述面向增减材制造的拓扑优化设计方法研究进展。
个人简介:刘继凯,山东大学教授,博导。主要研究方向包括结构拓扑优化、产品可制造性设计等,一作/通讯发表 SCI论文60余篇(ESI 高被引 7 篇),谷歌学术引用4850次, 2020-2024连续5年入选全球前2%顶尖科学家榜单(年度+资深)。2022年获得教育部科学技术进步二等奖1项。
本科生暂定将参与到以下四个DIY小组,完成对应任务并准备最终展示(点击以下图片可查看详情)表现优秀者可获得奖励
|
山东大学第十一届 "可视计算"暑期学校 |
|||||
|---|---|---|---|---|---|
| 日期 | 时间 | 主讲信息 | 报告题目 | 主持人 | 地点 |
| 7月11日 | 19:30-21:00 | 欢迎冷餐会 | 计算机学院 320 会议室 |
||
| 7月12日 | 08:30-08:50 | 开幕式 | 吕琳 | 图书馆 二楼报告厅 |
|
| 08:50-09:40 | Taku Komura,香港大学 | Physics-based Character Control | 屠长河 | ||
| 09:40-10:30 | 章国锋,浙江大学 | 端云协同的视觉定位与重建生成 | 钟凡 | ||
| 10:30-10:45 | 辛士庆,山东大学 | 基于神经符号距离函数的复杂几何建模 | |||
| 10:45-10:55 | 茶歇 | ||||
| 10:55-11:45 | 龙霄潇,南京大学 | 面向具身感知与操作的空间智能技术 | 辛士庆 | ||
| 11:45-12:00 | 钟凡,山东大学 | 动态物体的视觉定位与重建 | |||
| 12:00-14:00 | 午餐 | 曦园餐厅三楼 | |||
| 14:00-14:50 | 王鹤,北京大学 | 合成数据驱动的具身VLA预训练新范式 | 曾琼 | 图书馆 二楼报告厅 |
|
| 14:50-15:40 | 弋力,清华大学 | 从人类运动中学习多样化的人形机器人交互技能 | |||
| 15:40-15:55 | 李曼祎,山东大学 | 结构化场景理解与物体交互 | |||
| 15:55-22:00 | DIY G1. 智能机器人: 真实场景采集与重建 | 陈浩然 | 计算机学院 一楼实验室 |
||
| DIY G2. 几何建模与制造: 大模型之Text2CAD | 刘隆都 | ||||
| DIY G3. 视觉与AR:物体三维建模与运动跟踪 | 朱佳瑞 | ||||
| DIY G4. 科学数据可视化:基于光线投射的科学数据可视化入门 | 孟致远 | ||||
| 7月13日 | 08:30-09:20 | 许岚,上海科技大学 | 光场智能:从重建到生成 | 赵海森 | 图书馆 二楼报告厅 |
| 09:20-10:10 | 韩俊,香港科技大学 | Large-Scale Scientifc Data Compression and Visualization via Neural Fields | |||
| 10:10-10:25 | 曾琼,山东大学 | 智能驱动的海洋科学数据可视化探索 | |||
| 10:25-10:35 | 茶歇 | ||||
| 10:35-11:25 | 刘继凯,山东大学 | 面向增减材制造的结构拓扑优化研究 | 李曼祎 | ||
| 11:25-11:40 | 赵海森,山东大学 | 复杂几何的智能可制造性分析与计算 | |||
| 11:40-11:55 | 吕琳,山东大学 | 功能驱动的结构智能生成 | |||
| 11:55-14:00 | 午餐 | 曦园餐厅三楼 | |||
| 14:00-18:00 20:30-22:00 |
DIY G1. 智能机器人: 基于点云处理的路径规划 | 陈浩然 | 计算机学院 一楼实验室 |
||
| DIY G2. 几何建模与制造: 大模型之MCP协议 | 刘隆都 | ||||
| DIY G3. 视觉与AR:动态虚实融合效果的设计与实现 | 朱佳瑞 | ||||
| DIY G4. 科学数据可视化:交互式科学数据可视系统构建 | 孟致远 | ||||
| 18:30-20:30 | 晚宴 | 曦园餐厅三楼 | |||
| 7月14日 | 08:30-09:20 | 曾薇,西安交通大学 | 计算共形几何及应用 | 王鹏飞 | 图书馆 二楼报告厅 |
| 09:20-10:10 | 张举勇,中国科学技术大学 | 可解耦三维表达、建模与生成 | |||
| 10:10-10:20 | 茶歇 | ||||
| 10:20-11:10 | 李好,华中科技大学 | 基于共形几何的多尺度曲面结构设计方法 | 吕琳 | ||
| 11:10-11:25 | 屠长河,山东大学 | 图形学技术助力国产大飞机制造 | |||
| 11:25-12:00 | 航空航天智能制造论坛 | ||||
| 12:00-14:00 | 午餐 | 曦园餐厅三楼 | |||
| 14:00-16:00 | DIY G1. 智能机器人: 机器人移动与动作控制 | 陈浩然 | 计算机学院 一楼实验室 |
||
| DIY G2. 几何建模与制造: 大模型之微调技术 | 刘隆都 | ||||
| DIY G3. 视觉与AR:虚实融合效果的完善优化 | 朱佳瑞 | ||||
| DIY G4. 科学数据可视化:光影渲染与科学数据的创意碰撞 | 孟致远 | ||||
| 16:00-17:30 | 闭幕式及DIY精彩成果展示 | 图书馆二楼报告厅 | |||
在这里,大家协力合作,共同留下深刻的记忆
Enjoy every time, enjoy every one.
1. 如何确认最终能否参加暑期学校?
7月4日-7月5日为审核选拔阶段,期间向通过选拔的学员发送确认邮件。若收到邮件则表明已经审核通过。
2. 报名网站打不开,或其他原因导致无法报名?
可以下载报名表,填写后发到邮箱 IRCsummerschool@163.com ,邮件主题为“暑期学校报名”。