Mobility Fitting using 4D RANSAC
The Eurographics Symposium on Geometry Processing (SGP) 2016
1Shandong University 2Ben-Gurion University 3National University of Defense Technology

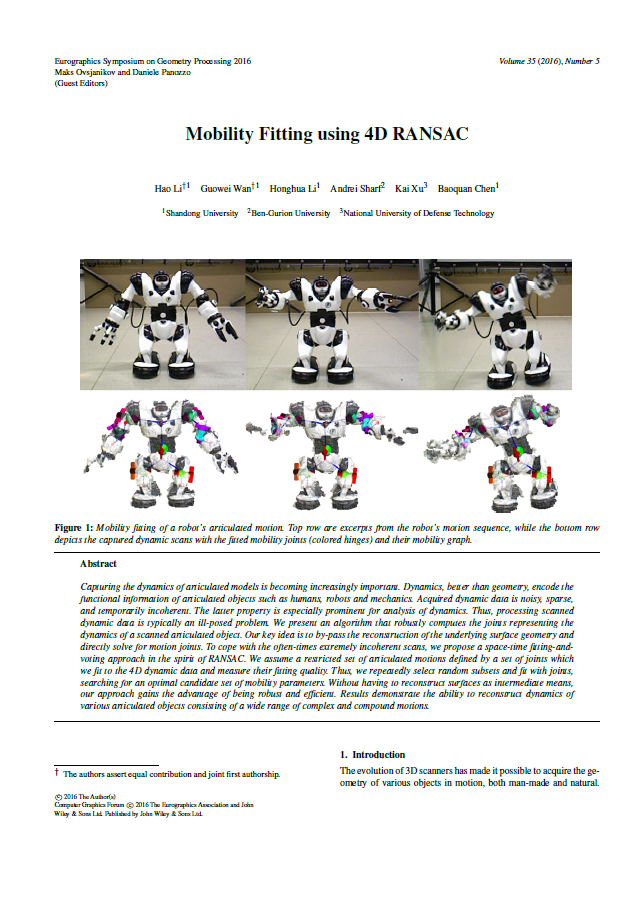
Mobility Fitting of a robot's articulated motion. Top row are excerpts from the robot's motion sequence, while the bottom row depicts the captured dynamic scans with the Fitted mobility joints (colored hinges) and their mobility graph.
Abstract
Capturing the dynamics of articulated models is becoming increasingly important. Dynamics, better than geometry, encode the functional information of articulated objects such as humans, robots and mechanics. Acquired dynamic data is noisy, sparse, and temporarily incoherent. The latter property is especially prominent for analysis of dynamics. Thus, processing scanned dynamic data is typically an ill-posed problem. We present an algorithm that robustly computes the joints representing the dynamics of a scanned articulated object. Our key idea is to by-pass the reconstruction of the underlying surface geometry and directly solve for motion joints. To cope with the often-times extremely incoherent scans, we propose a space-time Fitting-and-voting approach in the spirit of RANSAC. We assume a restricted set of articulated motions defined by a set of joints which we Fit to the 4D dynamic data and measure their Fitting quality. Thus, we repeatedly select random subsets and Fit with joints, searching for an optimal candidate set of mobility parameters. Without having to reconstruct surfaces as intermediate means, our approach gains the advantage of being robust and efficient. Results demonstrate the ability to reconstruct dynamics of various articulated objects consisting of a wide range of complex and compound motions.
Video
Downloads
Acknowledgement
We thank the reviewers for their valuable comments. We would also like to acknowledge our research grants: National 973 Program(2015CB352501), NSFC (61232011, 61572507, 61532003), NSFC-ISF(61561146397), ISF (1106/11), The Fundamental Research Funds of Shandong University (2015JC051), Shenzhen Knowledge innovation program for basic research (JCYJ20150402105524053).
BibTex
@Article{MobFit,
Title = {Mobility Fitting using 4D RANSAC},
Author = {Hao Li and Guowei Wan and Honghua Li and Andrei Sharf and Kai Xu and Baoquan Chen},
Journal = {Computer Graphics Forum},
Year = {2016},
Number = {5},
Pages = {79-88},
Volume = {35}
}